做分销网站百度关键词优化软件如何
这个是全网最详细的STM32项目教学视频。
第一篇在这里:
视频在这里
STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机 跟随
第18章-综合以上功能
18-按键和app按钮切换功能
根据上面介绍,我们的模式可以有:
**OLED显示模式: 速度、里程、电压、超声波数据、MPU6050俯仰角、横滚角、航向角 数据显示在OLED上和通过串口发送蓝牙APP **
PID循迹模式:红外对管PID循迹
手机遥控普通运动模式:遥控前、后、左、右加速运动
超声波避障模式
PID跟随模式:超声波PID定距离跟随
手机遥控角度闭环模式:MPU6050角度PID控制
可以设置标志位通过按键改变标志位,以实现功能切换。
定义一个全局变量,
uint8_t g_ucMode = 0;
//小车运动模式标志位 0:显示功能、1:PID循迹模式、2:手机遥控普通运动模式、3.超声波避障模式、4:PID跟随模式、5:遥控角度闭环
uint8_t g_ucMode = 0; //小车运动模式标志位
在gpio.h声明一下
extern uint8_t g_ucMode ; //小车运动模式标志位
按键中断回调函数里面补充按下按键后的处理
先不进行消抖,如果后面KEY1 KEY2效果不好再消抖
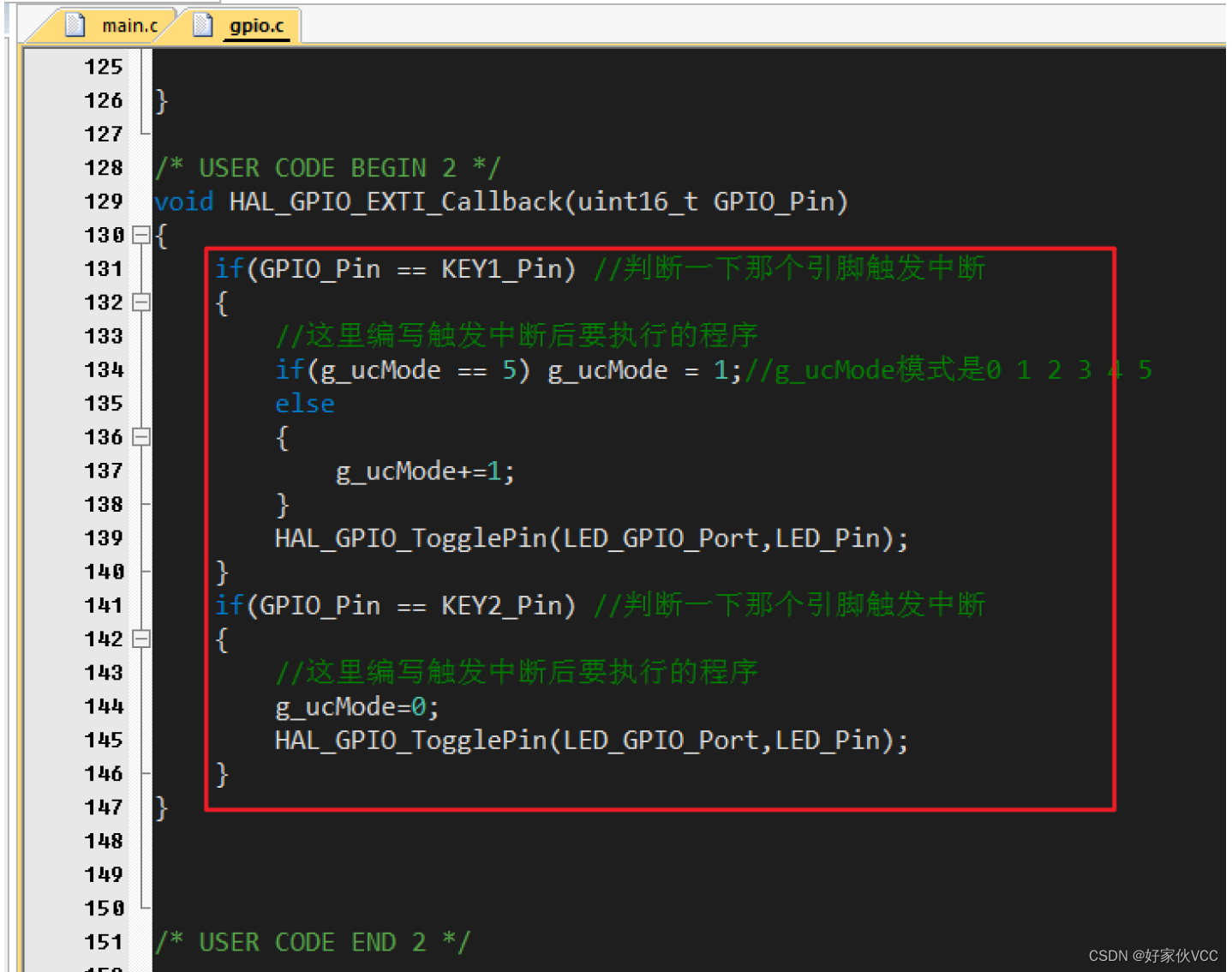
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == KEY1_Pin) //判断一下那个引脚触发中断{//这里编写触发中断后要执行的程序if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5 else{g_ucMode+=1;}HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);}if(GPIO_Pin == KEY2_Pin) //判断一下那个引脚触发中断{//这里编写触发中断后要执行的程序g_ucMode=0;HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);}
}
然后主函数显示当前处于的模式
然后判断当前模式 执行不同代码
方法:一个功能一个功能的添加代码,添加好一个调试测试一下,然后再添加下一个
下面这个就是我们主函数的代码。
sprintf((char *)OledString," g_ucMode:%d",g_ucMode);//显示g_ucMode 当前模式OLED_ShowString(0,6,OledString,12); //显示在OLED上sprintf((char *)Usart3String," g_ucMode:%d",g_ucMode);//蓝牙APP显示HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小if(g_ucMode == 0){//0LED显示功能sprintf((char*)OledString, "V1:%.2fV2:%.2f", Motor1Speed,Motor2Speed);//显示速度OLED_ShowString(0,0,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,sprintf((char*)OledString, "Mileage:%.2f", Mileage);//显示里程OLED_ShowString(0,1,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,sprintf((char*)OledString, "U:%.2fV", adcGetBatteryVoltage());//显示电池电压OLED_ShowString(0,2,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,sprintf((char *)OledString,"HC_SR04:%.2fcm\r\n",HC_SR04_Read());//显示超声波数据OLED_ShowString(0,3,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,sprintf((char *)OledString,"p:%.2f r:%.2f \r\n",pitch,roll);//显示6050数据 俯仰角 横滚角OLED_ShowString(0,4,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,sprintf((char *)OledString,"y:%.2f \r\n",yaw);//显示6050数据 航向角OLED_ShowString(0,5,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,//蓝牙APP显示sprintf((char*)Usart3String, "V1:%.2fV2:%.2f", Motor1Speed,Motor2Speed);//显示速度HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小//阻塞方式发送可以保证数据发送完毕,中断发送不一定可以保证数据已经发送完毕才启动下一次发送sprintf((char*)Usart3String, "Mileage:%.2f", Mileage);//显示里程HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小sprintf((char*)Usart3String, "U:%.2fV", adcGetBatteryVoltage());//显示电池电压HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小sprintf((char *)Usart3String,"HC_SR04:%.2fcm\r\n",HC_SR04_Read());//显示超声波数据HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小sprintf((char *)Usart3String,"p:%.2f r:%.2f \r\n",pitch,roll);//显示6050数据 俯仰角 横滚角HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小sprintf((char *)Usart3String,"y:%.2f \r\n",yaw);//显示6050数据 航向角HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小//获得6050数据while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){} //这个可以解决经常读不出数据的问题//显示模式电机停转motorPidSetSpeed(0,0);}if(g_ucMode == 1){///**** 红外PID循迹功能******************/g_ucaHW_Read[0] = READ_HW_OUT_1;//读取红外对管状态、这样相比于写在if里面更高效g_ucaHW_Read[1] = READ_HW_OUT_2;g_ucaHW_Read[2] = READ_HW_OUT_3;g_ucaHW_Read[3] = READ_HW_OUT_4;if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 ){
// printf("应该前进\r\n");//注释掉更加高效,减少无必要程序执行g_cThisState = 0;//前进}else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )//使用else if更加合理高效{
// printf("应该右转\r\n");g_cThisState = -1;//应该右转}else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 ){
// printf("快速右转\r\n");g_cThisState = -2;//快速右转}else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0){
// printf("快速右转\r\n");g_cThisState = -3;//快速右转}else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 0 ){
// printf("应该左转\r\n");g_cThisState = 1;//应该左转 }else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 1 ){
// printf("快速左转\r\n");g_cThisState = 2;//快速左转}else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 1){
// printf("快速左转\r\n");g_cThisState = 3;//快速左转}g_fHW_PID_Out = PID_realize(&pidHW_Tracking,g_cThisState);//PID计算输出目标速度 这个速度,会和基础速度加减g_fHW_PID_Out1 = 3 + g_fHW_PID_Out;//电机1速度=基础速度+循迹PID输出速度g_fHW_PID_Out2 = 3 - g_fHW_PID_Out;//电机1速度=基础速度-循迹PID输出速度if(g_fHW_PID_Out1 >5) g_fHW_PID_Out1 =5;//进行限幅 限幅速度在0-5之间if(g_fHW_PID_Out1 <0) g_fHW_PID_Out1 =0;if(g_fHW_PID_Out2 >5) g_fHW_PID_Out2 =5;if(g_fHW_PID_Out2 <0) g_fHW_PID_Out2 =0;if(g_cThisState != g_cLastState)//如何这次状态不等于上次状态、就进行改变目标速度和控制电机、在定时器中依旧定时控制电机{motorPidSetSpeed(g_fHW_PID_Out1,g_fHW_PID_Out2);//通过计算的速度控制电机}g_cLastState = g_cThisState;//保存上次红外对管状态 }if(g_ucMode == 2){//***************遥控模式***********************////遥控模式的控制在串口三的中断里面}if(g_ucMode == 3){//******超声波避障模式*********************//
避障逻辑if(HC_SR04_Read() > 25)//前方无障碍物{motorPidSetSpeed(1,1);//前运动HAL_Delay(100);}else{ //前方有障碍物motorPidSetSpeed(-1,1);//右边运动 原地 HAL_Delay(500);if(HC_SR04_Read() > 25)//右边无障碍物{motorPidSetSpeed(1,1);//前运动HAL_Delay(100);}else{//右边有障碍物motorPidSetSpeed(1,-1);//左边运动 原地HAL_Delay(1000);if(HC_SR04_Read() >25)//左边无障碍物{motorPidSetSpeed(1,1);//前运动HAL_Delay(100);}else{motorPidSetSpeed(-1,-1);//后运动HAL_Delay(1000);motorPidSetSpeed(-1,1);//右边运动HAL_Delay(50);}}}}if(g_ucMode == 4){//**********PID跟随功能***********//g_fHC_SR04_Read=HC_SR04_Read();//读取前方障碍物距离if(g_fHC_SR04_Read < 60){ //如果前60cm 有东西就启动跟随g_fFollow_PID_Out = PID_realize(&pidFollow,g_fHC_SR04_Read);//PID计算输出目标速度 这个速度,会和基础速度加减if(g_fFollow_PID_Out > 6) g_fFollow_PID_Out = 6;//对输出速度限幅if(g_fFollow_PID_Out < -6) g_fFollow_PID_Out = -6;motorPidSetSpeed(g_fFollow_PID_Out,g_fFollow_PID_Out);//速度作用与电机上}else motorPidSetSpeed(0,0);//如果前面60cm 没有东西就停止HAL_Delay(10);//读取超声波传感器不能过快}if(g_ucMode == 5){//*************MPU6050航向角 PID转向控制*****************//sprintf((char *)Usart3String,"pitch:%.2f roll:%.2f yaw:%.2f\r\n",pitch,roll,yaw);//显示6050数据 俯仰角 横滚角 航向角HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),0xFFFF);//通过串口三输出字符 strlen:计算字符串大小 //mpu_dmp_get_data(&pitch,&roll,&yaw);//返回值:0,DMP成功解出欧拉角while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){} //这个可以解决经常读不出数据的问题g_fMPU6050YawMovePidOut = PID_realize(&pidMPU6050YawMovement,yaw);//PID计算输出目标速度 这个速度,会和基础速度加减g_fMPU6050YawMovePidOut1 = 1.5 + g_fMPU6050YawMovePidOut;//基础速度加减PID输出速度g_fMPU6050YawMovePidOut2 = 1.5 - g_fMPU6050YawMovePidOut;if(g_fMPU6050YawMovePidOut1 >3.5) g_fMPU6050YawMovePidOut1 =3.5;//进行限幅if(g_fMPU6050YawMovePidOut1 <0) g_fMPU6050YawMovePidOut1 =0;if(g_fMPU6050YawMovePidOut2 >3.5) g_fMPU6050YawMovePidOut2 =3.5;if(g_fMPU6050YawMovePidOut2 <0) g_fMPU6050YawMovePidOut2 =0;motorPidSetSpeed(g_fMPU6050YawMovePidOut1,g_fMPU6050YawMovePidOut2);}
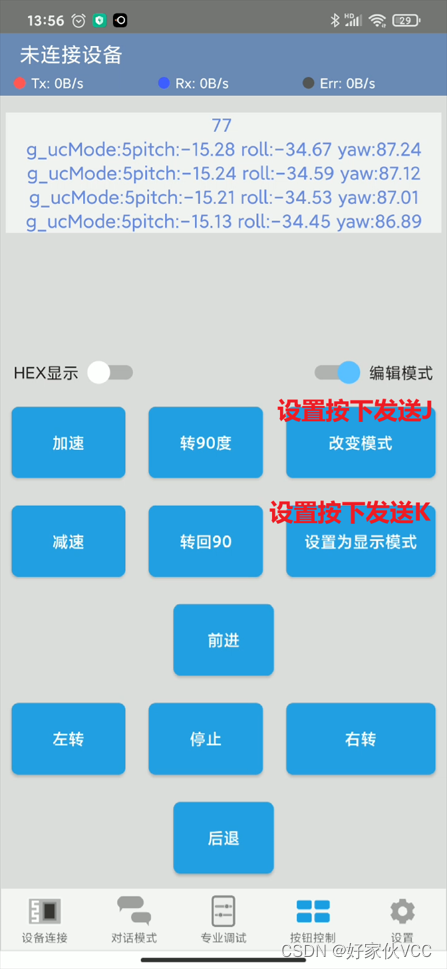
可以测试上面的代码 然后没有问题后,我们添加一个通过蓝牙APP按钮切换模式代码
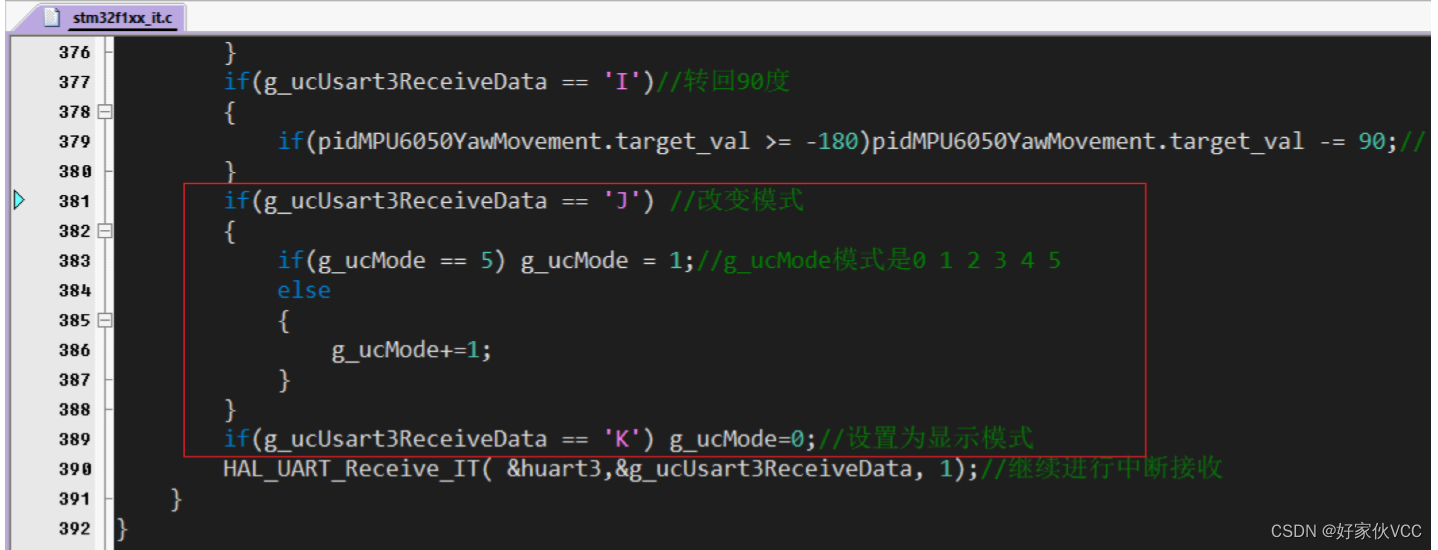
if(g_ucUsart3ReceiveData == 'J') //改变模式{if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5 else{g_ucMode+=1;}}if(g_ucUsart3ReceiveData == 'K') g_ucMode=0;//设置为显示模式
然后对应APP也要添加 按钮设置
我们
按键没有消抖效果不好,我们消抖一下
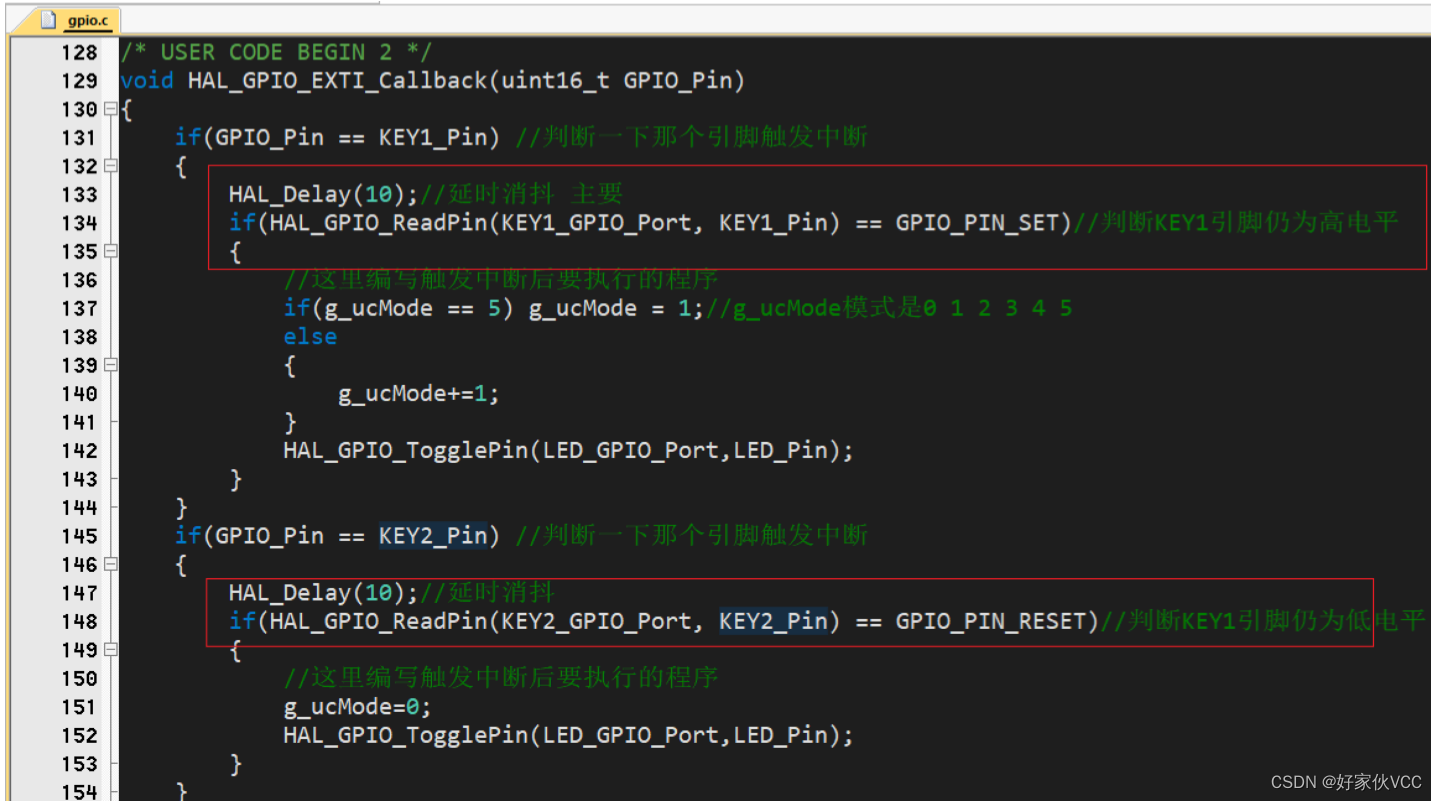
我们增加了 HAL延时和再次判断电平
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == KEY1_Pin) //判断一下那个引脚触发中断{HAL_Delay(10);//延时消抖 主要if(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_SET)//判断KEY1引脚仍为高电平{//这里编写触发中断后要执行的程序if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5 else{g_ucMode+=1;}HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);}}if(GPIO_Pin == KEY2_Pin) //判断一下那个引脚触发中断{HAL_Delay(10);//延时消抖if(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET)//判断KEY2引脚仍为低电平{//这里编写触发中断后要执行的程序g_ucMode=0;HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);}}
}但是测试不能执行中断,程序异常卡死了
原因是HAL_Delay使用的是sysTick 中断优先级在软件初始化是默认最低的,比外部中断优先级低,所以HAL_Delay不能在外部中断服务函数中调用。
所以我们可以通过提高sysTick 中断的优先级,提高的比HAL_Delay高。
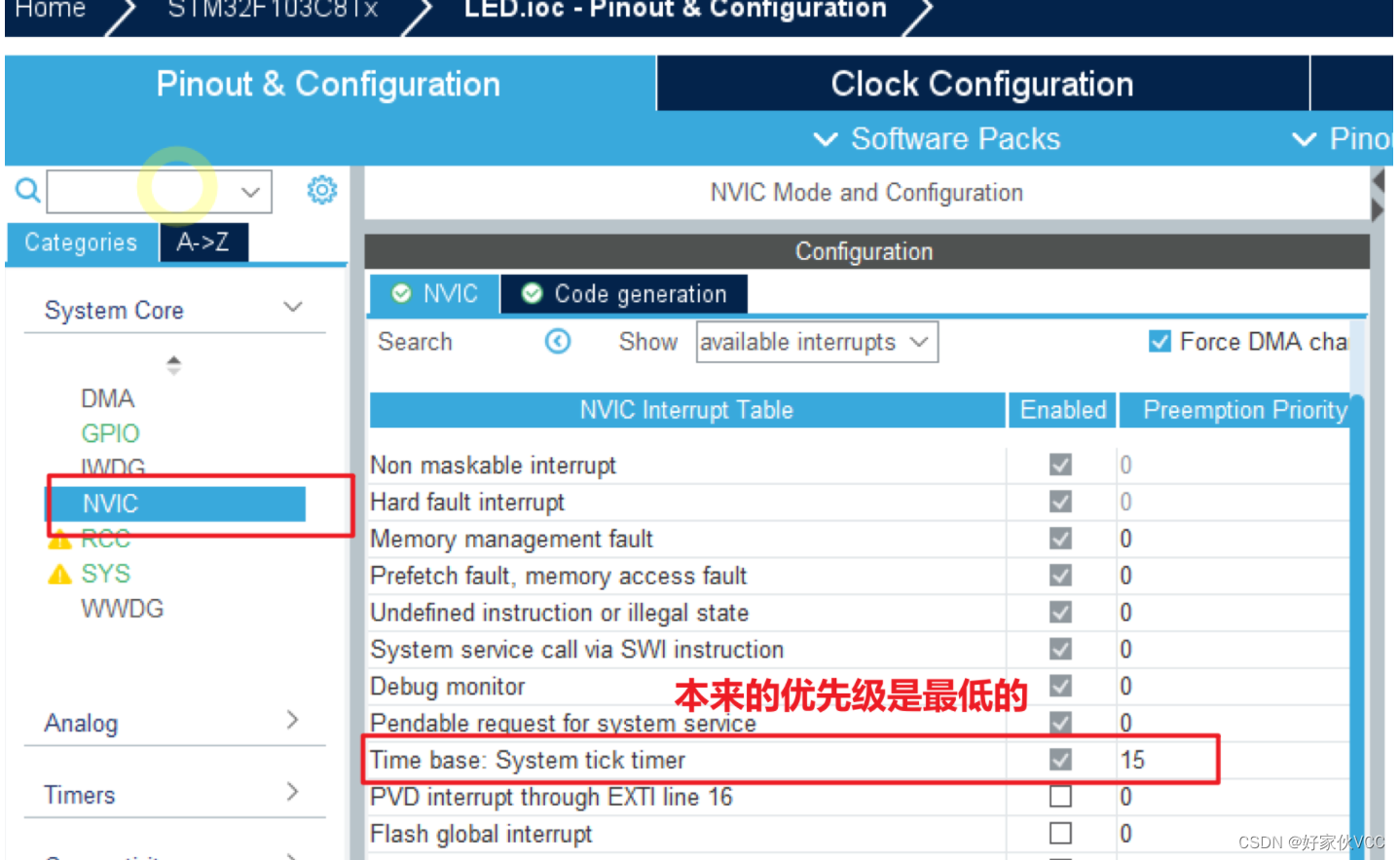
然后我们提高至 如下图
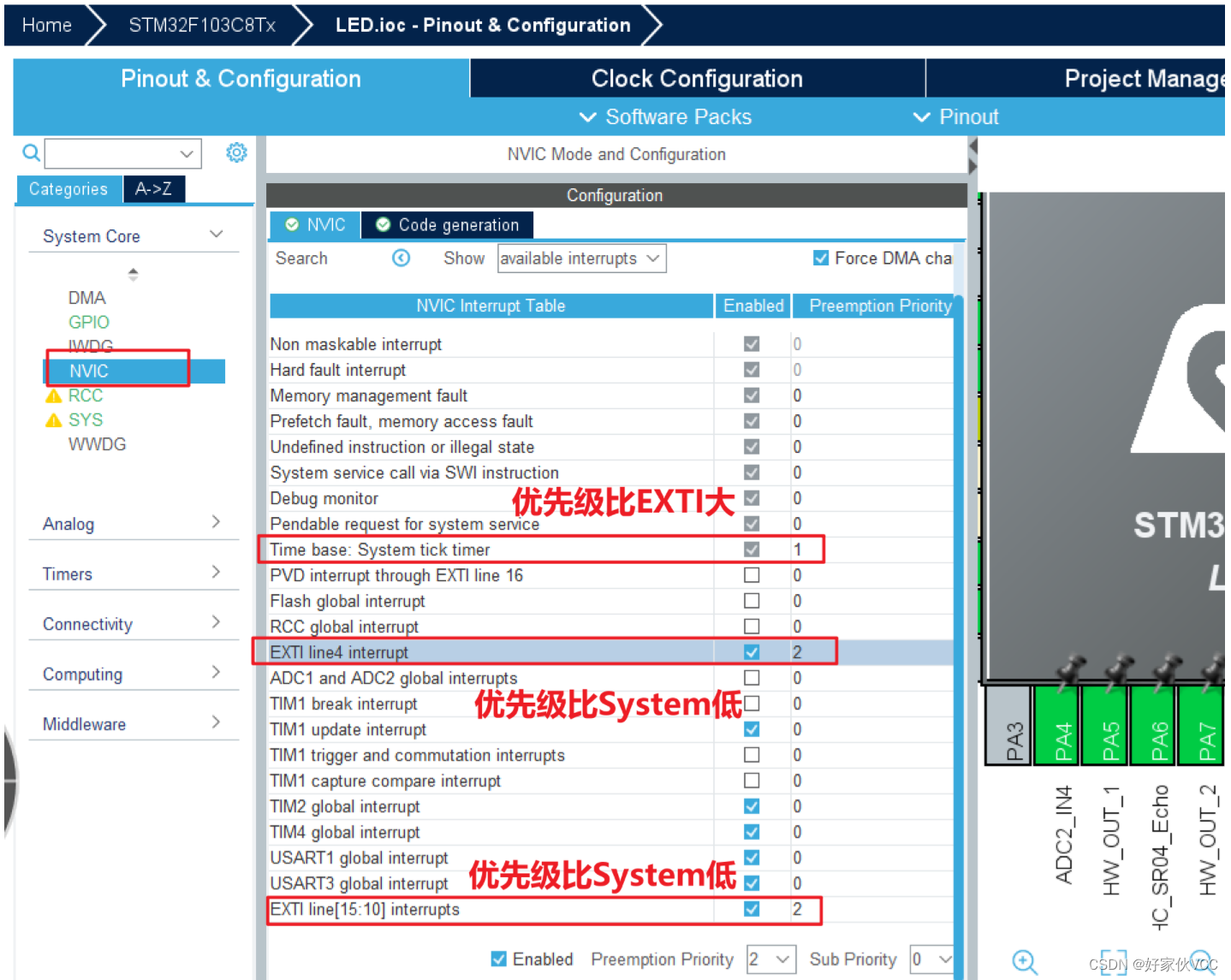
然后编译烧录测试按键是否更加稳定。
下面的章节我们讲解视觉,RTOS系统,电磁循迹等功能