产品网站建设建议磁力岛
目录
一、html控制LED
二、模拟数据上传到html
一、html控制LED
简单来说就是html给boa服务器发了一个控制指令信息,然后boa转发给cgi进程,cgi通过消息队列和主进程通信。主进程再去启动LED子线程。

这是老师给的工程。
以前学32都有这工具那工具来管理,现在就是自己建文件夹,然后写makefile来管理
先来看看makefile
KERNELDIR :=/home/book/Linux_4412/kernel/linux-3.14
PWD :=$(shell pwd)CROSS_COMPILE=arm-none-linux-gnueabi-
#CROSS_COMPILE=
CC=$(CROSS_COMPILE)gcc
CP=cpARM_DRVDIR=~/nfs_rootfs/drv/
NFS_BOA_WWWDIR=~/nfs_rootfs/boa/www/
NFS_BOA_CGIDIR=~/nfs_rootfs/boa/cgi-bin/obj-m +=demo.o
all:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
$(CC) -o cgi_led.cgi -static cgi_led.c
mv *.o *.mod.c *.order *.symvers objinstall:
sudo cp demo.ko $(ARM_DRVDIR)
sudo cp *.mp3 *.jpg led.html $(NFS_BOA_WWWDIR)
sudo cp cgi_led.cgi $(NFS_BOA_CGIDIR)clean:
$(MAKE) -C $(KERNELDIR) M=$(PWD) clean
rm -rf cgi_led.cgi
主要就是调用内核的makefile来编译我们的驱动程序,然后编译我们的LED的C文件生成cgi。
为了方便加上clean和install命令
/*************************************************************************# FileName : test.c# Author : fengjunhui # Email : 18883765905@163.com # Created : 2017年07月03日 星期一 15时48分02秒************************************************************************/#include<stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>#include <sys/ioctl.h>
#include <linux/limits.h>
#include <errno.h>
#include "chardev.h"#define LED_DEVICE "/dev/chrdev0"
#define MAX_BUFFER_SIZE PIPE_BUFint main(int argc, const char *argv[])
{int i = 0,j = 3;int nread;int led_control,led_state;int led_fd,fifo_fd;led_desc_t led;char *data;led_fd = open(LED_DEVICE,O_RDWR);if(led_fd < 0){printf("open failed !\n");}printf("open device success! led_fd: %d\n",led_fd);printf("Content-type: text/html;charset=utf-8\n\n");printf("<html>\n");printf("<head><title>cgi control led web</title></head>\n");printf("<body>\n");printf("<p>led is setted successful! you can watch the led's change</p>\n");//printf("<p><a herf=http://192.168.1.100/led.html>go back</a></p>\n");printf("<a href=\"/led.html\">go back led control page </a>");printf("</body>\n");data = getenv("QUERY_STRING"); //getenv()读取环境变量的当前值的函数 if(sscanf(data,"led_control=%d&led_state=%d",&led_control,&led_state)!=2){ //利用sscnaf()函数的特点将环境变量分别提取出led_control和led_state这两个值printf("<p>please input right"); printf("</p>");} printf("<p>led_control = %d,led_state = %d</p>", led_control, led_state);if(led_control < 2 || led_control > 5) { printf("<p>Please input 2<=led_control<=5!"); printf("</p>");} if(led_state>1) {printf("<p>Please input 0<=led_state<=1!"); printf("</p>"); }led.led_num = led_control;led.led_state = led_state;if(led.led_state == 0){ioctl(led_fd,FS_LED_OFF,&led);}else if(led.led_state == 1){ioctl(led_fd,FS_LED_ON,&led);}else if(led.led_state == 2){while(j --){for(i = 2; i <= 5; i ++ ){led.led_num = i;led.led_state = 0;ioctl(led_fd,FS_LED_OFF,&led);usleep(500000);led.led_state = 1;ioctl(led_fd,FS_LED_ON,&led);usleep(500000);}}}close(led_fd);printf("</html>\n");return 0;
}
这是老师再17年写的老代码了,主要就是接收html的指令然后发给A9主进程,但是由于这只是个测试所以没用主进程,直接再这个cgi进程中操作LED了。
昨天发烧没看清,录视频讲错了。
#include <linux/module.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/device.h>
#include <asm/uaccess.h>
#include <asm/io.h>#include "chardev.h"const char *name = "chrdev";
unsigned int major ;
struct class *cls;
struct device *dev;#define GPX2CON 0x11000c40
#define GPX2DAT 0x11000c44
#define GPX1CON 0x11000c20
#define GPX1DAT 0x11000c24
#define GPF3CON 0x114001e0
#define GPF3DAT 0x114001e4void __iomem * gpx2con_vir;
void __iomem * gpx2dat_vir;
void __iomem * gpx1con_vir;
void __iomem * gpx1dat_vir;
void __iomem * gpf3con_vir;
void __iomem * gpf3dat_vir;char kbuf[] = {'1','2','3','4'};loff_t demo_llseek(struct file *filp, loff_t offset, int cnt)
{printk("---->%s--->%d\n",__func__,__LINE__);return 0;
}ssize_t demo_read(struct file *filp, char __user *usrbuf, size_t count, loff_t *offset)
{int bytes = 0;printk("---->%s--->%d\n",__func__,__LINE__);bytes = copy_to_user(usrbuf,kbuf,4);if(bytes > 0){printk("copy_to_user failed!\n");}return 0;
}ssize_t demo_write(struct file *filp, const char __user *usrbuf, size_t size, loff_t *offset)
{int bytes = 0;printk("---->%s--->%d\n",__func__,__LINE__);bytes = copy_from_user(kbuf,usrbuf,4);if(bytes > 0){printk("copy_from_user failed\n");return -1;}printk("copy_from_user usrbuf:%c\n",kbuf[0]);return 0;
}long demo_ioctl(struct file *filp, unsigned int cmd, unsigned long args)
{int i;led_desc_t *led = (led_desc_t *)args;printk("---->%s--->%d\n",__func__,__LINE__);switch(cmd){case FS_LED_ON:i = led->led_num;printk("i= %d\n",i);if(i == 2){writel(readl(gpx2dat_vir) | (0x1 << 7),gpx2dat_vir);}else if(i == 3){writel(readl(gpx1dat_vir) | (0x1 << 0),gpx1dat_vir);}else if(i == 4){writel(readl(gpf3dat_vir) | (0x1 << 4),gpf3dat_vir);}else if(i == 5){writel(readl(gpf3dat_vir) | (0x1 << 5),gpf3dat_vir);}printk("FS_LED_ON. \n");break;case FS_LED_OFF:i = led->led_num;printk("i= %d\n",i);if(i == 2){writel(readl(gpx2dat_vir)&~(0x1 << 7),gpx2dat_vir);}else if(i == 3){writel(readl(gpx1dat_vir)&~(0x1 << 0),gpx1dat_vir);}else if(i == 4){writel(readl(gpf3dat_vir)&~(0x1 << 4),gpf3dat_vir);}else if(i == 5){writel(readl(gpf3dat_vir)&~(0x1 << 5),gpf3dat_vir);}printk("FS_LED_OFF. \n");break;default:printk("default :....\n");break;}return 0;
}int demo_open(struct inode *inode, struct file *filp)
{//硬件的初始化工作--收发数据的初始化printk("---->%s--->%d\n",__func__,__LINE__);return 0;
}int demo_close(struct inode *inode, struct file *filp)
{printk("---->%s--->%d\n",__func__,__LINE__);return 0;
}const struct file_operations fops = {.open=demo_open,.llseek=demo_llseek,.read=demo_read,.write=demo_write,.unlocked_ioctl=demo_ioctl,.release=demo_close,
};void gpio_ioremap(void)
{gpx2con_vir = ioremap(GPX2CON,8);gpx2dat_vir = gpx2con_vir + 4;gpx1con_vir = ioremap(GPX1CON,8);gpx1dat_vir = gpx1con_vir + 4;gpf3con_vir = ioremap(GPF3CON,8);gpf3dat_vir = gpf3con_vir + 4;writel((readl(gpx2con_vir) & ~(0XF<< 28))| (0x1 << 28),gpx2con_vir);writel((readl(gpx1con_vir) & ~(0XF<< 0))| (0x1 << 0),gpx1con_vir);writel((readl(gpf3con_vir) & ~(0XF<< 16 ))| (0x1 << 16),gpf3con_vir);writel((readl(gpf3con_vir) & ~(0XF<< 20 ))| (0x1 << 20),gpf3con_vir);}static int __init demo_init(void)
{printk("---->%s--->%d\n",__func__,__LINE__);major = register_chrdev(0,name,&fops); if(major <= 0){printk("register_chrdev failed!\n");}printk("register_chrdev success .major: %d\n",major);cls = class_create(THIS_MODULE,name);if(cls == NULL){printk("class_create failed!\n");}dev = device_create(cls, NULL,MKDEV(major,0),NULL,"chrdev0");if(dev == NULL){ printk("device_create failed!\n");}gpio_ioremap();return 0;
}void viraddr_iounmap(void)
{iounmap(gpx2con_vir);iounmap(gpx1con_vir);iounmap(gpf3con_vir);
}static void __exit demo_exit(void)
{printk("---->%s--->%d\n",__func__,__LINE__);viraddr_iounmap();device_destroy(cls,MKDEV(major,0));class_destroy(cls);unregister_chrdev(major,name);
}module_init(demo_init);
module_exit(demo_exit);
MODULE_LICENSE("GPL");
这就是一个LED的驱动程序
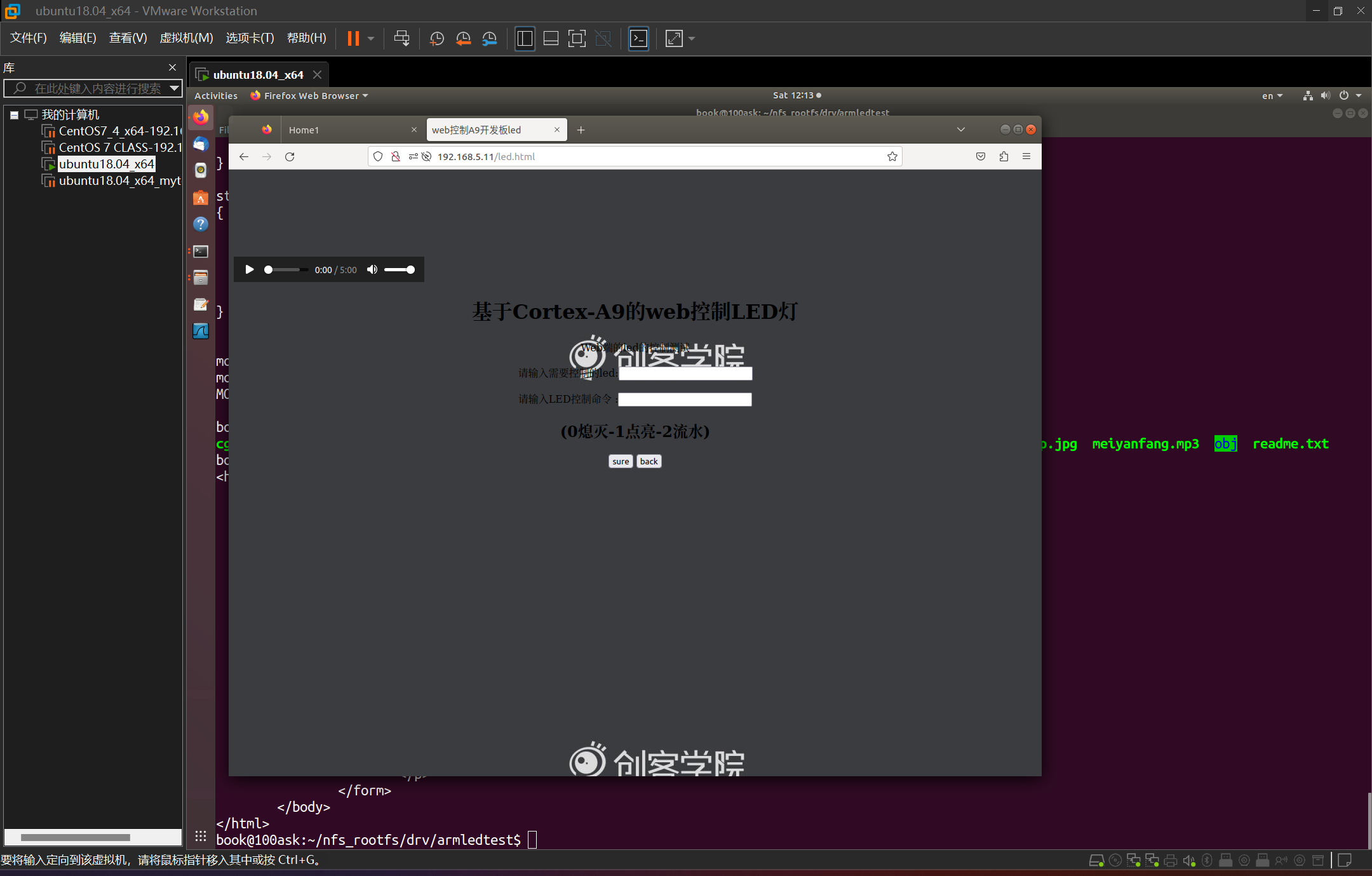
<html xmlns="http://www.w3.org/1999/xhtml"><head><meta http-equiv="Content-Type" content="text/html; charset=utf-8" /> <title>web控制A9开发板led</title></head><body background="./makeru-desktop.jpg"><br/><embed src="./meiyanfang.mp3" autostart="true" loop="true" hidden="true"> <h1 align="center">基于Cortex-A9的web控制LED灯</h1><!--新建一个表单,动作链接到开发板的/cgi-bin/cgi_led.cgi,采用的方法为GET--> <form action="/cgi-bin/cgi_led.cgi" method="get"> <p align="center">Web端的led的控制测试</p><p align="center">请输入需要控制的led:<input type="text" name="led_control"/></p><p align="center">请输入LED控制命令 :<input type="text" name="led_state"/></p><h2 align="center"> (0熄灭-1点亮-2流水)</h2> <p align="center"><input type="submit" value="sure"/> <input type="reset" value="back"/></p></form></body>
</html>
LED的前端程序,和搞web的差远了哈,这个不用精通会点就行,这部分工作以后公司有专人做的。
嵌入式安防监控项目——LED控制_哔哩哔哩_bilibili
二、模拟数据上传到html
#include "data_global.h"
#include "sem.h"#define N 1024 //for share memoryextern int shmid;
extern int msgid;
extern int semid;extern key_t shm_key;
extern key_t sem_key;
extern key_t key; //msg_keyextern pthread_mutex_t mutex_client_request,mutex_refresh,mutex_sqlite,mutex_transfer,mutex_analysis,mutex_sms,mutex_buzzer,mutex_led,mutex_camera;extern pthread_cond_t cond_client_request,cond_refresh,cond_sqlite,cond_transfer,cond_analysis,cond_sms,cond_buzzer,cond_led,cond_camera;extern struct env_info_client_addr sm_all_env_info;struct shm_addr{char shm_status; //shm_status���Ե���home_id���������ֹ����ڴ�����struct env_info_client_addr sm_all_env_info;
};
struct shm_addr *shm_buf;int file_env_info_struct(struct env_info_client_addr *rt_status,int home_id);void *pthread_refresh(void *arg)
{//semaphore for access to resource limitsif((sem_key = ftok("/tmp",'i')) < 0){perror("ftok failed .\n");exit(-1);}semid = semget(sem_key,1,IPC_CREAT|IPC_EXCL|0666);if(semid == -1) {if(errno == EEXIST){semid = semget(sem_key,1,0777);}else{perror("fail to semget");exit(1);}}else{init_sem (semid, 0, 1);}//share memory for env_info refresh configif((shm_key = ftok("/tmp",'i')) < 0){perror("ftok failed .\n");exit(-1);}shmid = shmget(shm_key,N,IPC_CREAT|IPC_EXCL|0666);if(shmid == -1) {if(errno == EEXIST){shmid = shmget(key,N,0777);}else{perror("fail to shmget");exit(1);}}//share memapif((shm_buf = (struct shm_addr *)shmat(shmid,NULL,0)) == (void *)-1){perror("fail to shmat");exit(1);}printf("pthread_refresh ......>>>>>>>\n");#if 1bzero (shm_buf, sizeof (struct shm_addr));while(1){sem_p(semid,0);shm_buf->shm_status = 1;file_env_info_struct(&shm_buf->sm_all_env_info,shm_buf->shm_status);sleep(1);sem_v(semid,0);}
#endif }int file_env_info_struct(struct env_info_client_addr *rt_status,int home_id)
{int env_info_size = sizeof(struct env_info_client_addr);printf("env_info_size = %d.\n",env_info_size);rt_status->monitor_no[home_id].zigbee_info.temperature = 10.0;rt_status->monitor_no[home_id].zigbee_info.tempMIN = 2.0;rt_status->monitor_no[home_id].zigbee_info.tempMAX = 20.0;rt_status->monitor_no[home_id].zigbee_info.humidity = 20.0;rt_status->monitor_no[home_id].zigbee_info.humidityMIN = 10.0;rt_status->monitor_no[home_id].zigbee_info.humidityMAX = 30.0;rt_status->monitor_no[home_id].zigbee_info.reserved[0] = 0.01;rt_status->monitor_no[home_id].zigbee_info.reserved[1] = -0.01;rt_status->monitor_no[home_id].a9_info.adc = 9.0;rt_status->monitor_no[home_id].a9_info.gyrox = -14.0;rt_status->monitor_no[home_id].a9_info.gyroy = 20.0;rt_status->monitor_no[home_id].a9_info.gyroz = 40.0;rt_status->monitor_no[home_id].a9_info.aacx = 642.0;rt_status->monitor_no[home_id].a9_info.aacy = -34.0;rt_status->monitor_no[home_id].a9_info.aacz = 5002.0;rt_status->monitor_no[home_id].a9_info.reserved[0] = 0.01;rt_status->monitor_no[home_id].a9_info.reserved[1] = -0.01;return 0;
}
这是A9刷新的线程程序
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/shm.h>
#include <string.h>
#include <errno.h>
#include <sys/sem.h>
#include <unistd.h>
#include "sem.h"
#include "cgic.h"
#include "data_global.h"#define N 32#define MONITOR_NUM 1char status[2][6] = {"Close", "Open"};
char fan_status[4][6] = {"Close", "One", "Two", "Three"};struct shm_addr{char shm_status;struct env_info_client_addr sm_all_env_info;
};int cgiMain()
{key_t key;int shmid,semid;struct shm_addr *shm_buf;if((key = ftok("/tmp",'i')) <0){perror("ftok");exit(1);}printf("key = %x\n",key);if((semid = semget(key, 1, 0666)) < 0){perror("semget");exit(1);}if((shmid = shmget(key, N, 0666 )) == -1){perror("shmget");exit(1);}if((shm_buf = (struct shm_addr*)shmat(shmid, NULL, 0)) == (void*)-1 ){perror("shmat");exit(1);}sem_p(semid,0);cgiHeaderContentType("text/html");fprintf(cgiOut, "<head><meta http-equiv=\"refresh\" content=\"1\"><style><!--body{line-height:50%}--></style> </head>");fprintf(cgiOut, "<HTML>\n");fprintf(cgiOut, "<BODY bgcolor=\"#666666\">\n");
//fprintf(cgiOut, "<h1><font color=\"#FF0000\">HOME_ID #%d:</font></H2>\n ", shm_buf->shm_status);if (shm_buf->shm_status == 1){fprintf(cgiOut, "<script>function show(){var date =new Date(); var now = \"\"; now = date.getFullYear()+\"年\"; now = now + (date.getMonth()+1)+\"月\"; \ now = now + date.getDate()+\"日\"; now = now + date.getHours()+\"时\"; now = now + date.getMinutes()+\"分\";now = now + date.getSeconds()+\"秒\"; document.getElementById(\"nowDiv\").innerHTML = now; setTimeout(\"show()\",1000);} </script> \n "); fprintf(cgiOut, "<h2><font face=\"Broadway\"><font color=\"#00FAF0\">Home1 Real-time Environment Info:</font></font></H2>\n ");fprintf(cgiOut, "<h2 align=center><font color=\"#cc0033\"><body onload=\"show()\"> <div id=\"nowDiv\"></div></font></h2> \n "); fprintf(cgiOut, "<h4>ZIGBEE数据显示部分</H4>\n ");fprintf(cgiOut, "<h4>Temperature:\t%0.2f</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].zigbee_info.temperature );fprintf(cgiOut, "<h4>Humidity:\t%0.2f</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].zigbee_info.humidity);fprintf(cgiOut, "<h4>A9数据显示部分</H4>\n ");fprintf(cgiOut, "<h4>Adc:\t%0.2f</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.adc);fprintf(cgiOut, "<h4>GYROX:\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.gyrox);fprintf(cgiOut, "<h4>GYROY:\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.gyroy);fprintf(cgiOut, "<h4>GYROZ:\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.gyroz);fprintf(cgiOut, "<h4>AACX :\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.aacx);fprintf(cgiOut, "<h4>AACY :\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.aacy);fprintf(cgiOut, "<h4>AACZ :\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.aacz);fprintf(cgiOut, "<h4>A9-RESERVED[0]:\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.reserved[0]);fprintf(cgiOut, "<h4>A9-RESERVED[1]:\t%d</H4>\n ", shm_buf->sm_all_env_info.monitor_no[shm_buf->shm_status].a9_info.reserved[1]);fprintf(cgiOut, "<h4>STM32数据显示部分</H4>\n ");fprintf(cgiOut, "<h4>......</H4>\n ");}else{fprintf(cgiOut, "<h2><font face=\"Broadway\"><font color=\"#FFFAF0\">Close!</font></font></H2>\n "); }
// fprintf(cgiOut, "<h3>:</H3>\n "); fprintf(cgiOut, "</BODY></HTML>\n"); sem_v (semid, 0);return 0;
}
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
#include <unistd.h>
#include <errno.h>
#include "cgic.h"
#include "data_global.h"#define home_id 1struct shm_addr{char shm_status; //shm_status可以等于home_id,用来区分共享内存数据struct env_info_client_addr sm_all_env_info;
};
struct shm_addr *shm_buf;#if 0
struct setEnv
{int temMAX;int temMIN;int humMAX;int humMIN;int illMAX;int illMIN;
};
#endif int cgiMain()
{key_t key;char sto_no[2];char buf[20];struct shm_addr new;int msgid;struct msg msg_buf;memset(&msg_buf,0,sizeof(msg_buf));cgiFormString("store", sto_no, 2);cgiFormString("temMAX", buf, 20);new.sm_all_env_info.monitor_no[home_id].zigbee_info.tempMAX = atoi(buf);cgiFormString("temMIN", buf, 20);new.sm_all_env_info.monitor_no[home_id].zigbee_info.tempMIN = atoi(buf);cgiFormString("humMAX", buf, 20);new.sm_all_env_info.monitor_no[home_id].zigbee_info.humidityMAX = atoi(buf);cgiFormString("humMIN", buf, 20);new.sm_all_env_info.monitor_no[home_id].zigbee_info.humidityMIN = atoi(buf);//cgiFormString("illMAX", buf, 20);//new.illMAX = atoi (buf);//cgiFormString("illMIN", buf, 20);//new.illMIN = atoi (buf);if((key = ftok("/tmp", 'g')) < 0){perror("ftok");exit(1);}if((msgid = msgget(key, 0666)) < 0){perror("msgget");exit(1);}memcpy (msg_buf.text+1, &new, 24);msg_buf.type = 1L;msg_buf.msgtype = 5L;msg_buf.text[0] = sto_no[0];msgsnd(msgid, &msg_buf,sizeof(msg_buf)-sizeof(long),0);sto_no[0] -= 48;cgiHeaderContentType("text/html\n\n"); fprintf(cgiOut, "<HTML><HEAD>\n"); fprintf(cgiOut, "<TITLE>My CGI</TITLE></HEAD>\n"); fprintf(cgiOut, "<BODY>"); fprintf(cgiOut, "<H2>send sucess</H2>");//fprintf(cgiOut, "<a href='.html'>返回</a>"); fprintf(cgiOut, "<meta http-equiv=\"refresh\" content=\"1;url=../home%d.html\">", sto_no[0]);fprintf(cgiOut, "</BODY>\n"); fprintf(cgiOut, "</HTML>\n"); return 0; }
这俩是CGI相关的程序都是为了完成数据的刷新

录了讲解视频,后面发评论区